

Autonomous Driving or Self Driving
In the last decade, information communication technology and the vehicle industry came together for better driving experience. Now, day by day, the cars are rapidly becoming smarter than expected. Now, the cars aren’t just mechanical machines, rather they are becoming more smarter to the extent that they can drive themselves. We call it, in particular, autonomous driving. Autonomous driving is being most talked about core technology of smart cars.
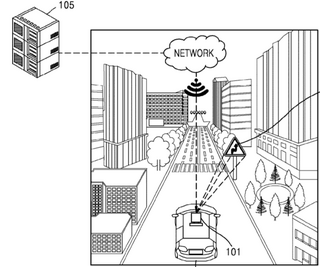
In autonomous driving, technology allows a car to drive itself to a destination without a human driver rotating a steering wheel, pressing an accelerator or a brake, or the other controls. This self driving car has one of the most important device to implement such a tricky task, called a distance sensor. The distance sensor outputs various waveforms such as ultrasound waves, laser, etc., and then receives reflected waveforms to control a car by recognizing and determining driving surroundings.
A distance sensor is a sensor for obtaining a shape or location of an object. For example, a time-of-flight (TOF) sensor, a structured light sensor, an ultrasound sensor, an infrared light sensor, and a laser sensor such as a light detection and ranging (lidar) sensor. The lidar sensor can be a multibeam lidar sensor, and a microelectromechanical systems (MEMS)/optical phased arrays (OPA) lidar sensor.
Sensor Issue
For autonomous driving, safety has to be guaranteed. So there is an essential need for accuracy of object information obtained by a distance sensor(e.g a lidar sensor). In some cases, where the distance sensor obtains shape information of an object by using a multiple waveforms, there is a possibility that accurate shape information can’t be obtained because characteristics of the waveforms are different from each other. In addition, due to a change in surroundings, there is a high possibility that an error may occur in the shape information about the object obtained by the distance sensor, and therefore, calibration of the distance sensor is required for accuracy of the distance sensor.
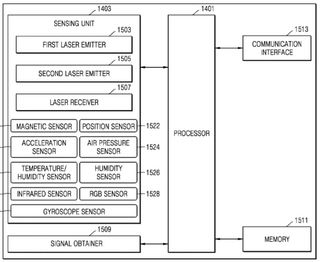
The Distance sensor envisioned by Samsung:
- A sensing unit- A Sensing unit is configured to emit beams and receive reflection signals.
- A processor – The processor obtains information about surface of an object, control the sensing unit and perform calibration on beam emitted by the sensing unit.
Method of distance sensor calibration by Samsung
Samsung introduced a calibration method performed by a distance sensor itself. This calibration method is performed in three major steps :
Step 1 : Obtain information about one surface of an object. (Method 1 or Method 2)
Step 2: Obtain distance sensor data by emitting beams and receiving reflection signals from the one surface of the object.
Step 3: Perform calibration on the beams emitted by the distance sensor, based on the information about the one surface of the object and the distance sensor data.
We will see these steps in the detail-
Step 1: Obtain information about one surface of an object.
Here, objects may be a road sign, a ground, a surface of a road, a wall, a license plate, a guardrail, a curb, a portion (e.g., a pillar, a side surface, etc.) of a bridge, a portion (e.g., a side surface) of a high-level road, a mark of a bus stop, a pillar for marking a waiting place or station, a signboard, etc.
Method 1 :Using external server data
Here sensor can get the information about the one surface of the object from an external server. The information may be location information of the object and shape information(one surface) of the object. The external server may have map data with information about locations of various objects such as roads, road signs, traffic signals, buildings, etc.
Method 2: Calculating Movement distance and direction of distance sensor
Distance sensor can get the information about the one surface of the object by getting a movement distance and a movement direction of the distance sensor using two reflection results. For this, the distance sensor emits a first beam at a first location to the object and gets a first reflection result. Similarly, emitting a second beam at a second location gives a second reflection result.
Now, We have to estimate the first location and the second location based on the two reflection results. For this, matching is done of the first reflection result with the second reflection result. The matching of the results can be done by obtaining data by using a sensor other than the distance sensor.
Step 2: Obtain distance sensor data
Emitting the beams is based on the location information of the object. Further, the distance sensor data is obtained based on reflection results corresponding to the reflection signals of the beams about the one surface of the object.
Step 3: Perform calibration on the beams
In the last step, the calibration is done on the beams emitted by the distance sensor, based on the information about the one surface of the object(Step 1) and the distance sensor data(Step 2).
The calibration is done by comparing the shape information about the one surface of the object with each of the reflection results corresponding to the reflection signals of the beams. Here, the calibration on each of the beams consists of adjusting a parameter for processing the reflection signals. This is to make the corresponding reflection results of beams be equal to each other or be equal to predicted reflection results. The parameter includes, for example, one of a beam horizontal angle parameter, a beam vertical angle parameter, a measurement distance offset parameter, and a reflectance parameter.
The calibration can be of two types, intrinsic calibration and extrinsic calibration. The intrinsic calibration adjusts a parameter for processing a reflection signal of a beam and the extrinsic calibration adjusts parameters that are determined according to a location of the distance sensor.
Others in the Similar Development
Google Inc. (2015) and Microsoft (2015) are developing similar technology for autonomous driving. Samsung may face challenge on this calibration method to get an exclusive right. Further, some highly talented individuals also been reported working on the calibration issue.
More on Electronics Engineering